Sense-Plan-Act 모델은 새로운 부분은 아닙니다.
여러 산업군에서부터 ISO 26262에서 시스템을 정의한 내용과도 유사한 모델입니다.
그러나 자율주행 시스템을 접근하고 이해하는데 해당 모델을 통해서 어떻게 풀어나가는지 이해하는 차원에서 한번 더 해당 내용을 가지고서 스터디 해보고 있습니다.
아래 내용들을 참고하시기 바랍니다.
The key system elements and their interactions are represented by the "Sense-Plan-Act" model.
The element "Sense" executes the perception part (including localization), i.e. the creation of an environmental model based on the information received from sensing both the vehicle's external and internal environment as well as the vehicle and system states.
The element "Plan" applies its goals and policies on the environmental model provided by the Sense element to derive the control actions.
Finally, the element "Act" executes the control actions.
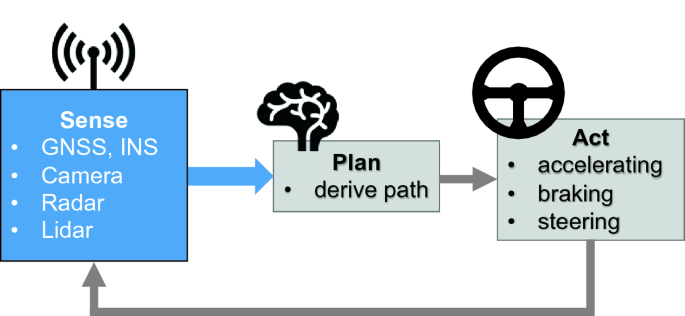
"SENSE" represents everything related to environment perception. within "PLAN" the necessary decisions are made based on the information from SENSE. "ACT" includes the controlling of steering, acceleration, and deceleration of the vehicle based on commmands from PLAN.
This chain of command illustrates how important a reliable environment perception system is for every automated vehicle.
Sensor faults, either cuased by internal malfunctions (e.g., broken antennas) or disturbing external factors (e.g., adverse weather conditions), propose a considerable danger for each automated vehicle's anticipated functionality.
Unfortunately, Sensor redudancy can impact on cost factor play a significant role and therefore proposes a limiting factor to sensor redundancy.
The sensor FDIIR system constantly monitors the activity of the respective perception sensor for correct operation.
여기서 말하는 FDIIR system 에 대해서는 논문을 읽어보고 업데이트 하도록 하겠습니다.

감사합니다.