다음 글의 내용은 레이더 생초짜, 자동차 산업 분야의 기술에 관심이 있는데 모르는 분들을 대상으로 글을 적습니다.
넓은 마음으로 이해주시면서 읽어주시기 바랍니다.
이전 글에서 짧게 말씀 드렸던 Resolution에 대해 이어서 설명 드립니다.
(Radar) FOV: Field Of ViewResolution이라고 명시된 부분은 해상도라고 이해하시면 됩니다. 흔히 컴퓨터, 모니터에서 해상도 1920 어쩌고 저쩌고 말할 때 쓰이는 것처럼 얼마나 잘게 쪼갤 수 있는지를 말합니다. 위 그림은 각도 angle에 대해서 얼마나 쪼갤 수 있는지를 나타내는 부분이라고 이해하시면 됩니다. 다른 글에서 좀 더 다루기로 하겠습니다. 출처: https://hujubkang.tistory.com/entry/FOV-Field-Of-View [허접.강기사의 재미없는 놀이] |
해상도, 분해력 등 국문으로 하면 다양하게 불려질 수 있는데, 우리가 다뤄야 하는 Resolution의 큰 범위는 3가지로 말씀 드릴 수 있습니다.
* Range (거리)
* Velocity (속도)
* Angle (각도)
위 3가지는 레이더를 활용하는 목적이기도 하죠. 대상의, 대상과의 거리, 속도, 각도에 대한 정보를 획득하기 위해서 레이더를 활용하니까요.
아래 그림의 경우 Radar에서 대상 2개를 각각 구분할 수 있는지, 또는 하나의 타겟으로 구분하는 지를 보여주는 예시입니다. 거리 해상도가 두 대상 타겟의 거리보다 작은 경우, 왼쪽 그림과 같이 다른 신호로 구분이 되지만, 오른쪽과 같이 레이더의 해상도로 구분할 수 없는 거리에 존재하는 경우 하나의 대상으로 인식하게 됩니다.
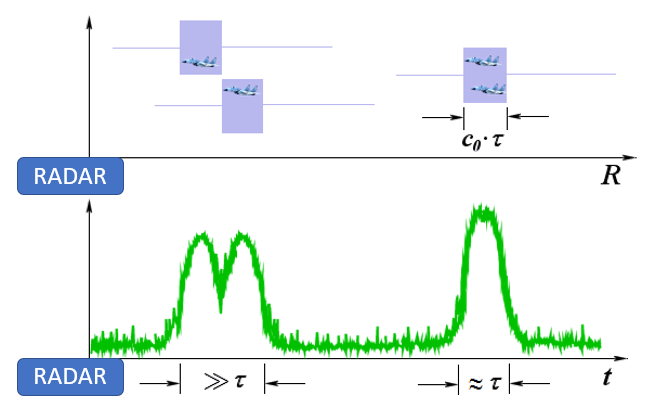
(그림 출처: www.radartutorial.eu/01.basics/Range%20Resolution.en.html)
현실에서 내가 운전하는 차량 앞에 여러 대상(차)가 동일 선 상으로 주행하는 경우, 거리 해상도에 따라 하나의 대상으로 또는 다른 대상으로 구분할 수 있습니다.
(여기서 각도, 속도 값의 차이가 더해지면서 구분할 수 있는 점들은 논의하지 않기로 합니다)

다음은 각도 Angle, Resolution를 설명하면 앞서 설명한 것과 같은 논리로 이해하시면 됩니다. 위 그림을 아래와 같이 그려볼 수 있습니다.
얼마나 촘촘하게 각도를 쪼갤 수 있는지에 따라 대상을 구분할 수 있는지 달라지게끔 됩니다.

이제 속도 Velocity 해상도를 위와 같이 그림으로 그려본다면,
말씀드리기 전에 제약사항으로, 각도 Angle로도, 거리 Range로도 구분이 되지 않는 경우,
레이더의 속도 Velocity 해상도가 2km/h 이하라면 아래 두 대상을 구분할 수 있을 것 입니다. (A Case)
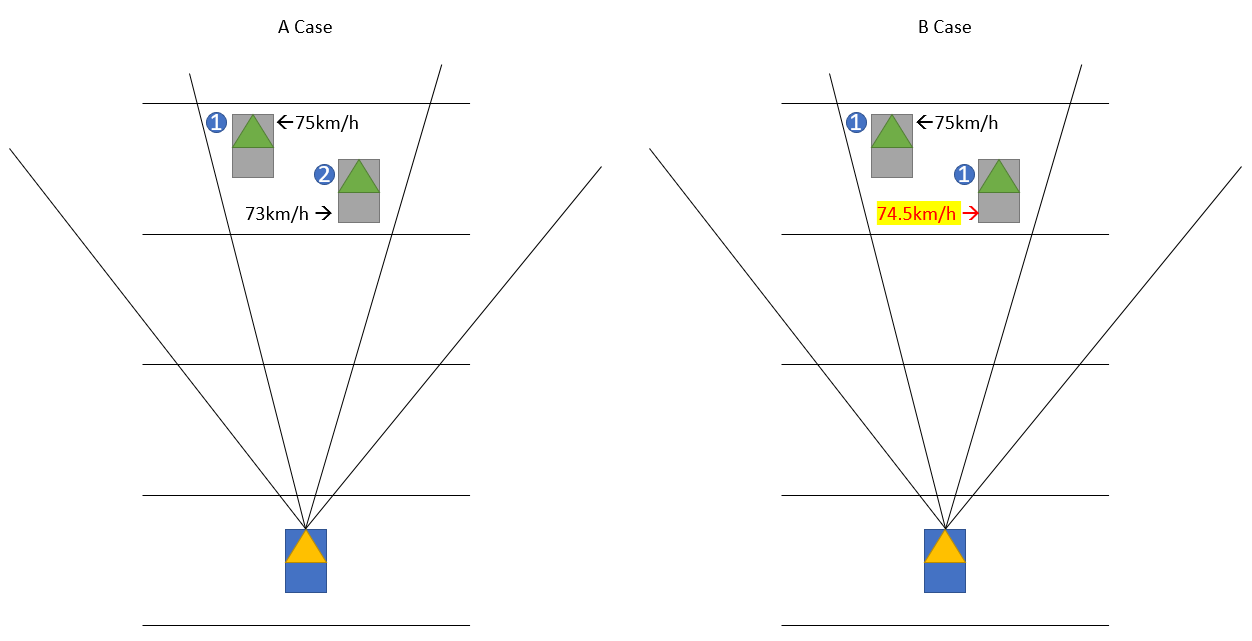
반면에 B Case의 경우 두 대상을 하나로 구분할 것입니다.
위 예시들은 Resolution과 관련하여 설명을 드리기 위해서 임의로 작성하였으므로 실제와는 많이 다를 수 있고, 다릅니다. 예를 들면 동일 거리에 비슷한 속도로 주행하는 차량이라고 할지라도 각도의 차이가 더해져서 대상 차량을 구분할 수 있기 때문입니다.
그렇기 때문에 Spec 상에 기재된 물리적(또는 산출식으로 계산)으로 기입된 수치는 현실적으로 다를 수 있는 부분들이 있다는 점 이해하시기 바랍니다.
Range Resolution의 경우 아래와 같은 수식으로 계산되기 때문에 Bandwidth가 좋아진다. 높아진다. 는 경우 해상도가 좋아지게 됩니다. 여기서 c는 빛의 속도, B는 Bandwidth를 의미합니다.

Velocity Resolution의 경우 아래 수식을 보시면 Tc, Cycle time, 즉 Observation time이 늘어나게 되면 좋아집니다.
여기서 lamda는 wave length, 오메가는 위상차를 의미합니다.

Angle resolution의 경우 안테나 거리, 공간에 따라 달라지게 됩니다.

즉 크고/넓고, 오랫동안 감지할 수 있고 Bandwidth가 큰 안테나라면 아주 좋은 성능을 낼 수 있다는 얘기입니다. 우리가 국방이나 항공과 관련하여 사용되는 레이더가 차량용 레이더와는 비교가 될 수 없는 크기인 것을 감안해 보시면 아쉴 수 있습니다.
아래 그림은 차량에 장착되는 레이더, 카메라, GPS, 라이다가 장착되는 센서를 표기해 놓은 것입니다.
차량에 장착되는 레이더는 작고, 가벼워야 합니다. 국방, 항공과 같이 안전과 관련한 분야에서 사용되는 레이더보다 많은 제약사항을 가질 수 밖에 없습니다.
(개인적으로 제약사항이 많은 곳에서 더 많이 생각하고 고민할 수 있다는 측면에서 긍정적으로 생각해봅니다.)

(그림 출처: www.hyundainews.com/en-us/releases/2478)
이상 읽어주셔서 감사합니다.
오늘도 스마일! 그리고 화이팅! 입니다.
'레이더(Radar)' 카테고리의 다른 글
| (Radar) Wave basic (1) | 2021.04.15 |
|---|---|
| (Radar) FOV: Field Of View (0) | 2021.04.14 |
| Tip. RADAR & RF Study (0) | 2020.12.30 |
| Homologation 차량 형식 승인 (0) | 2020.08.24 |
| RADAR 개요 (0) | 2020.08.20 |